Featured Article
Latest Publication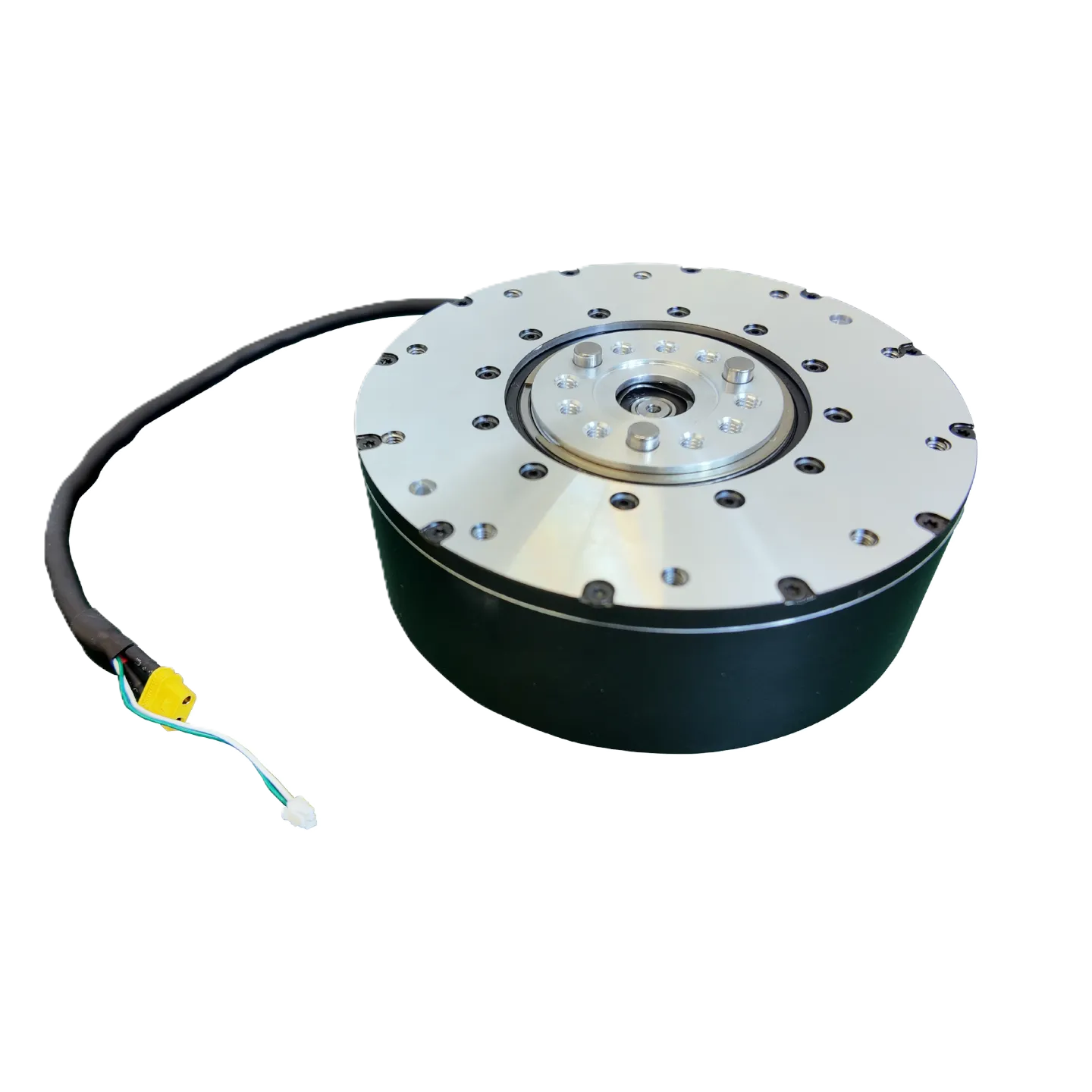
Humanoid Actuator
11 min read
Proprioceptive Actuator for Humanoid Robots: QDD Joint Design Guide
How low reflected inertia, dual encoders, QDD design and EtherCAT/CANopen/CAN FD control shape humanoid hip, knee and ankle actuator selection.
Jun 27, 2026
Read guide