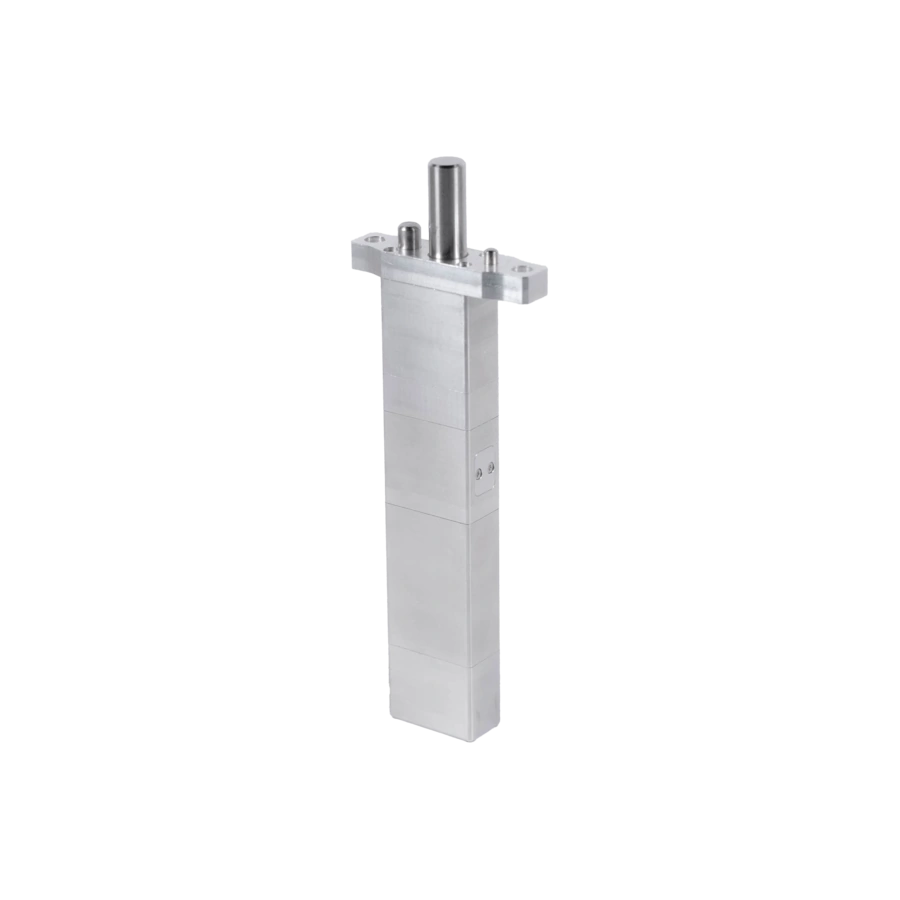

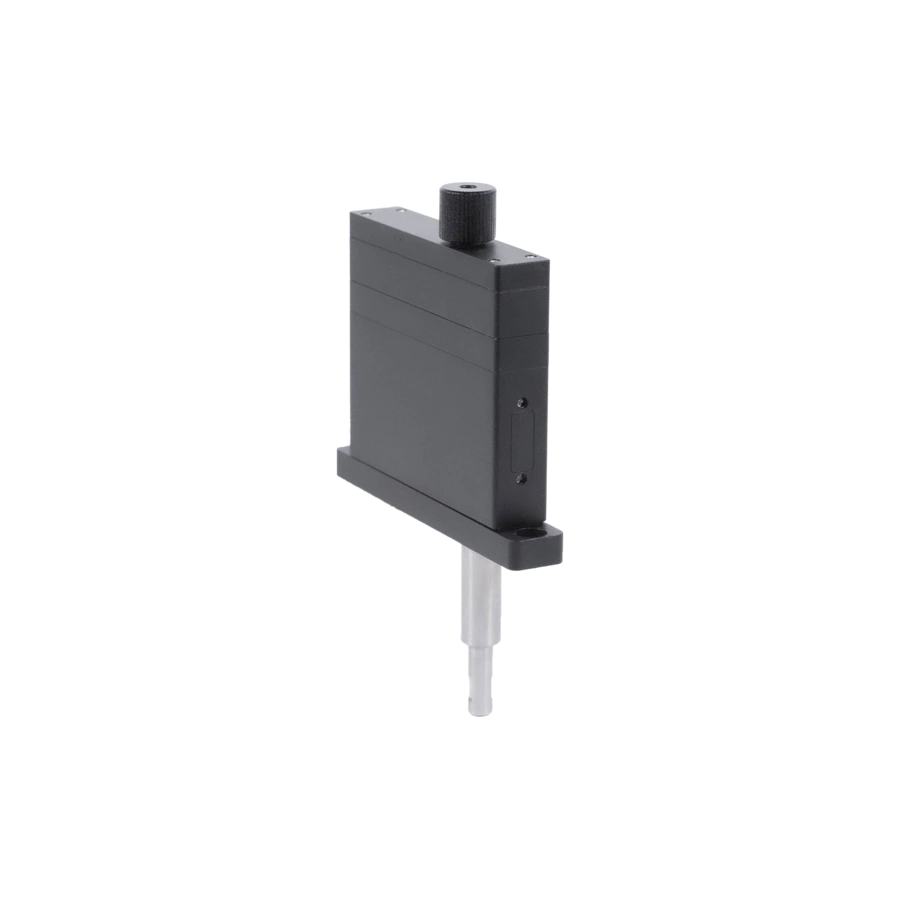




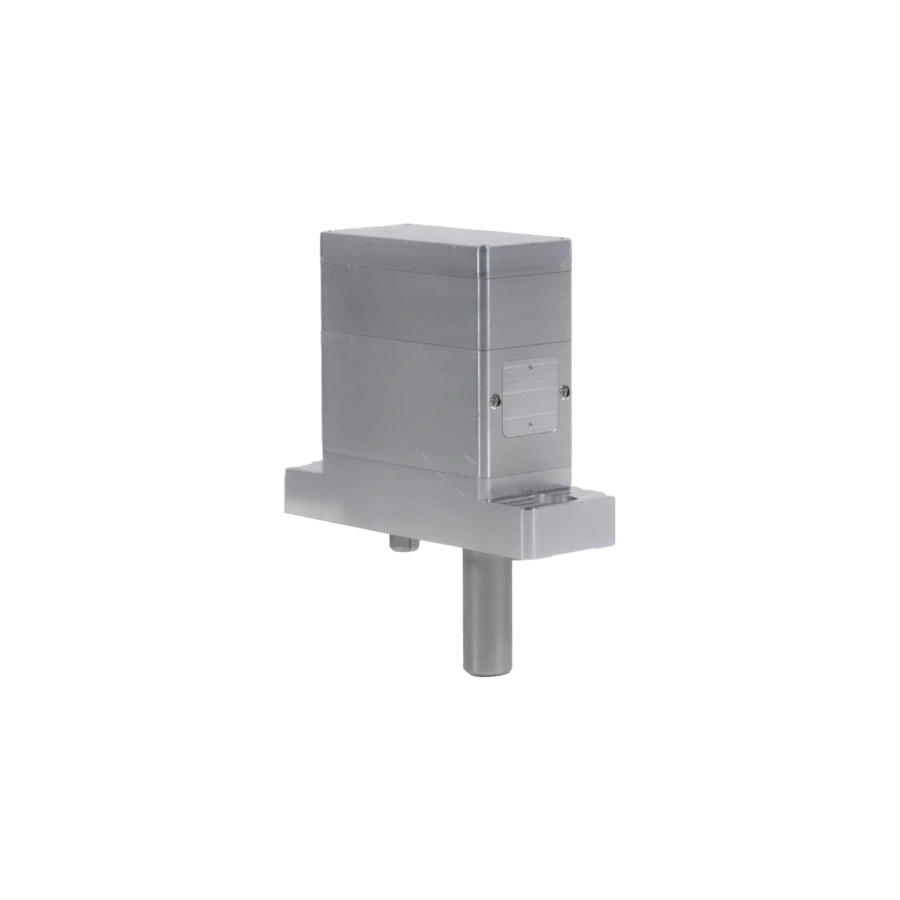
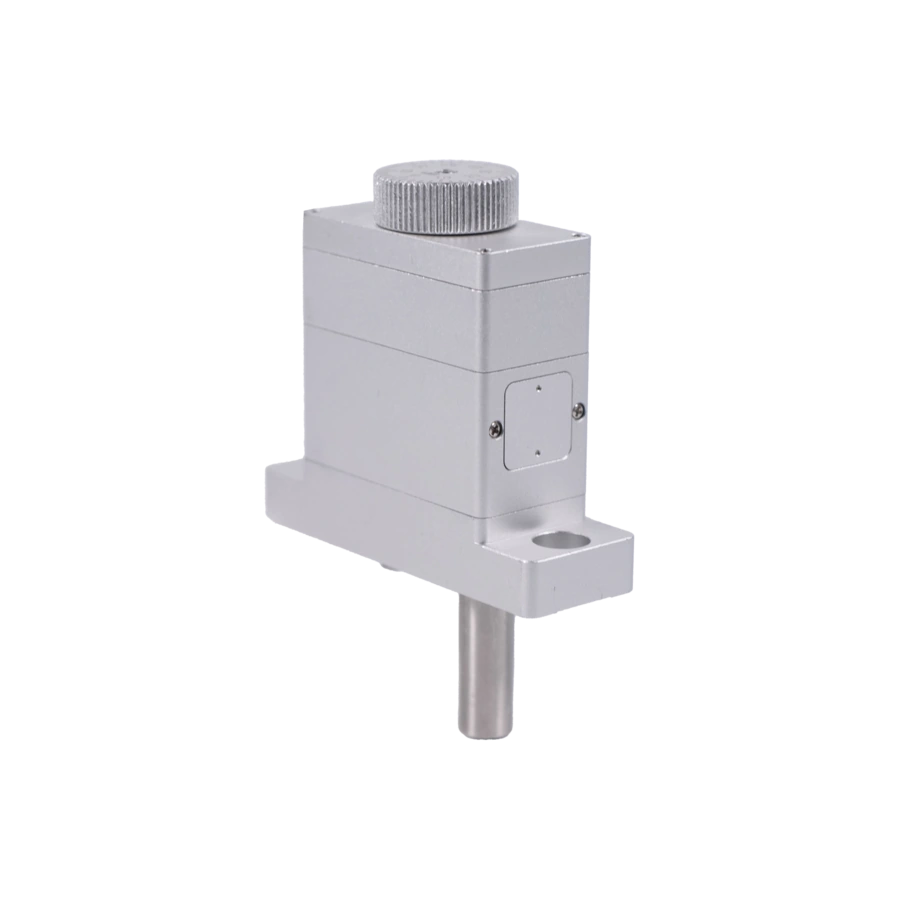

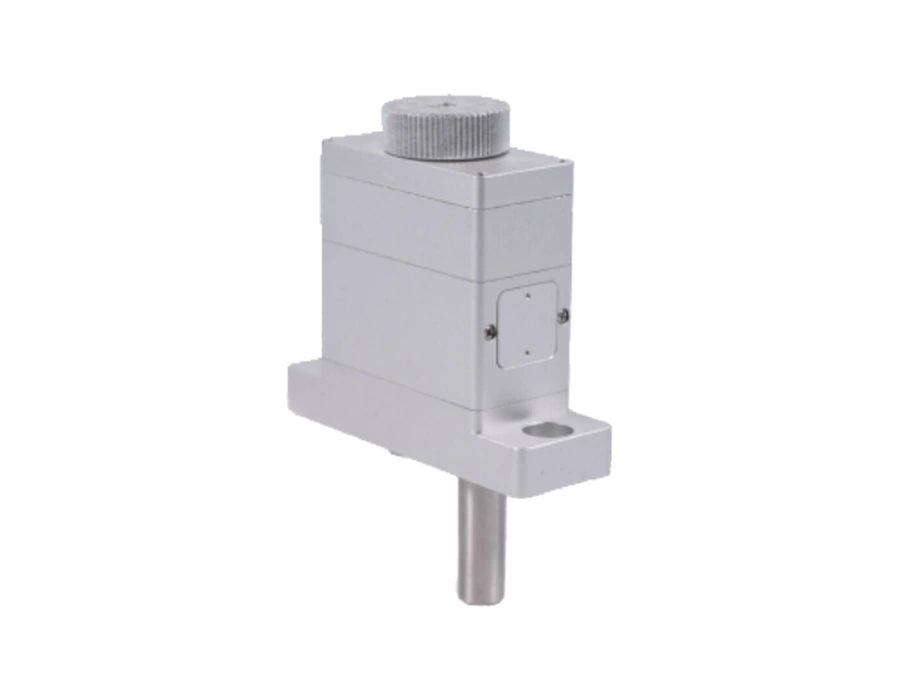
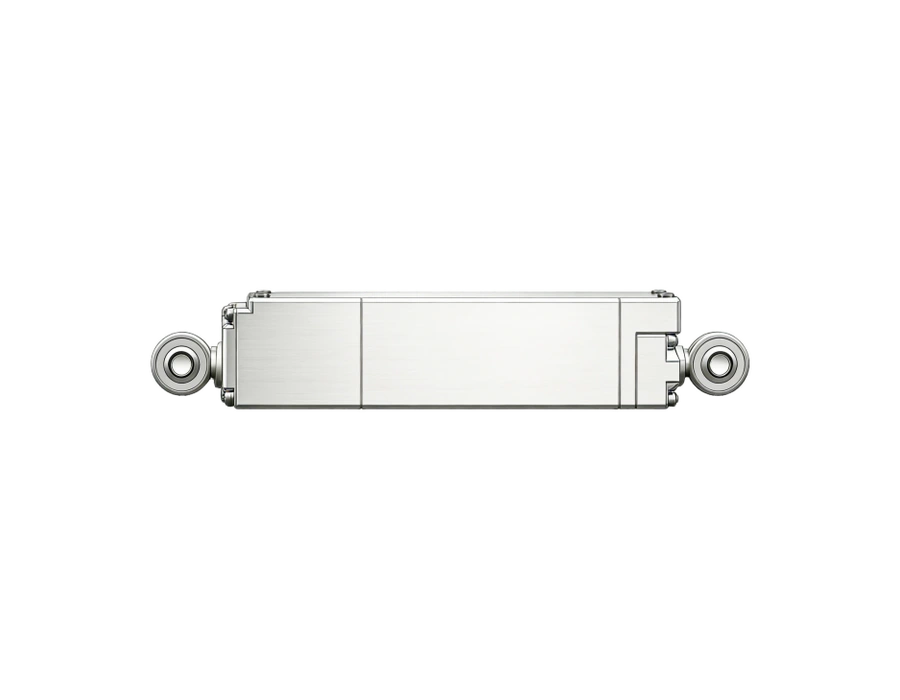
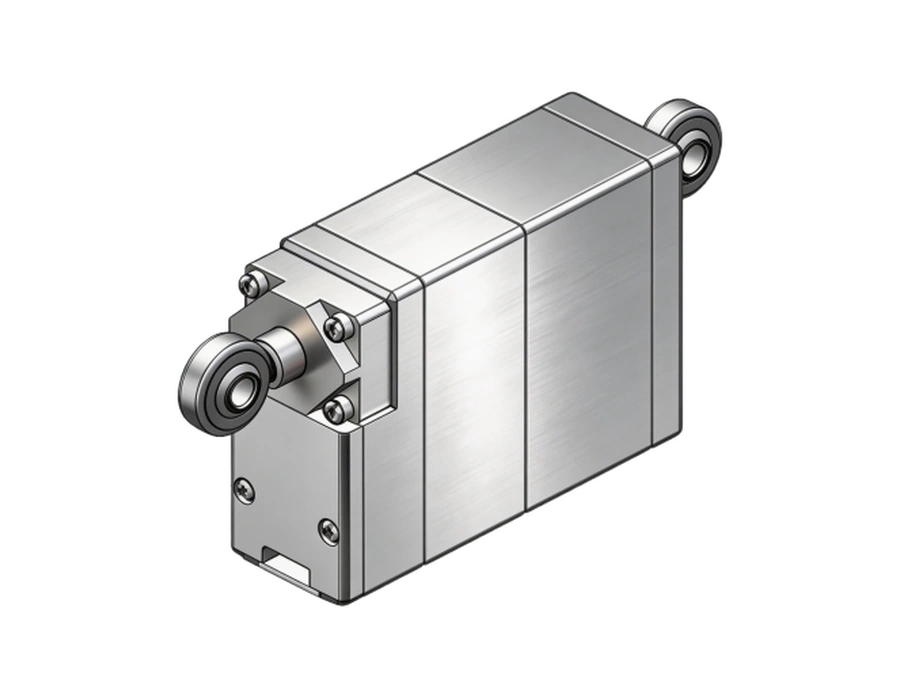
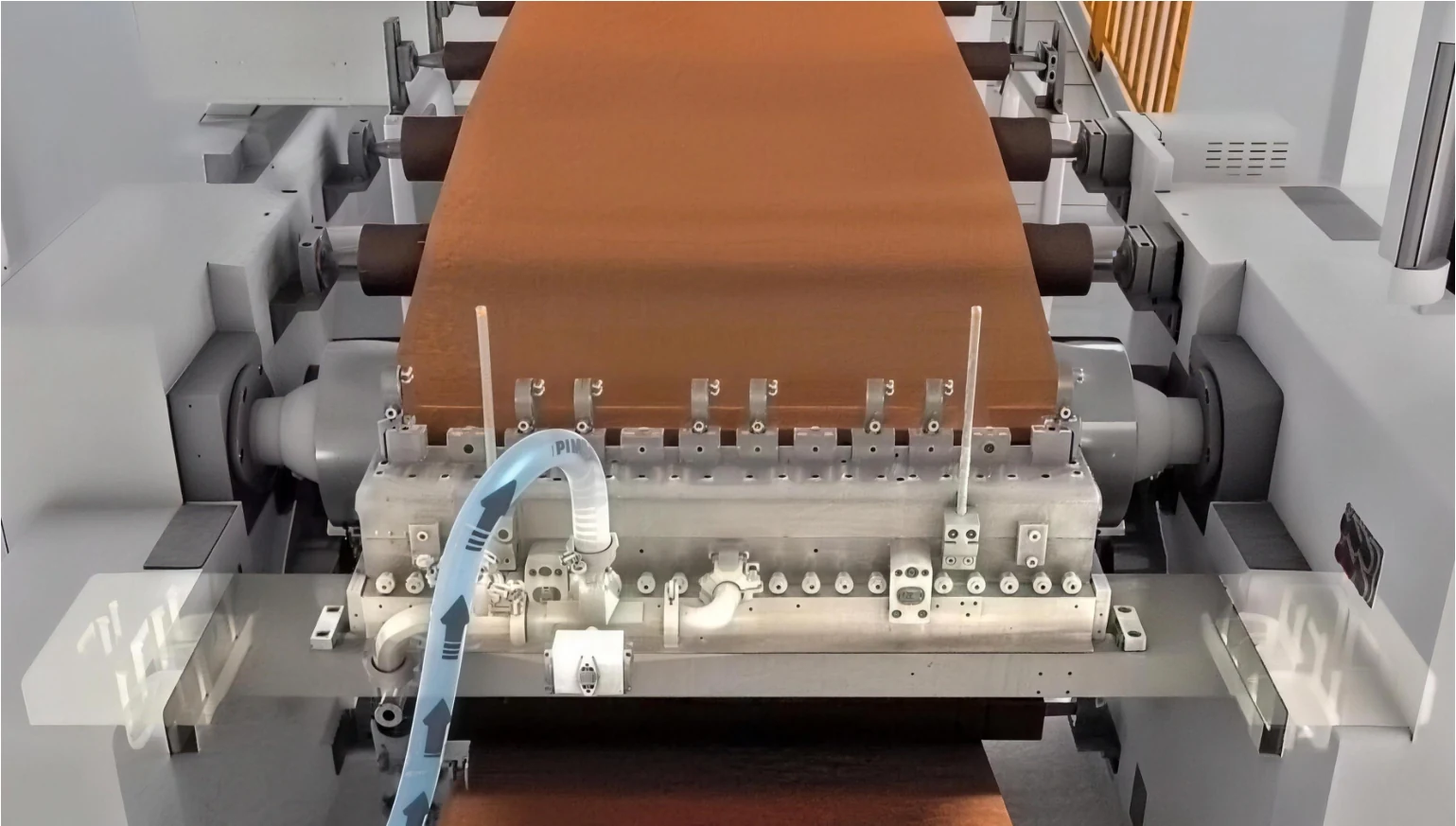
Lithium battery coating die-head control
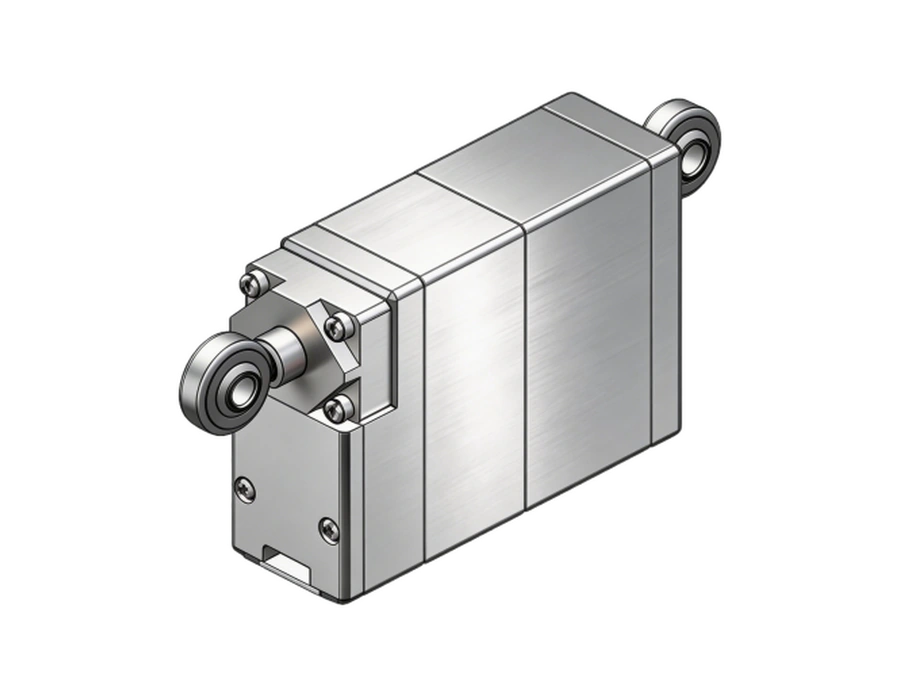
FT models are a practical fit for compact die-head or T-block adjustment where the machine needs short-stroke electric motion, RS485 control, and repeatable setup values. Final coating performance still depends on die design, pump control, web speed, sensor feedback, and machine stiffness.



