ZHR-MEC-DE-TB-10-030-14
ZHR-MEC-DE-TB-10-030-14 is a 12 V RS485 micro servo actuator for dexterous robotic thumb mechanisms. It provides 10mm stroke, 30N rated force, 40N maximum force, and +/-0.05mm repeatability for compact robotic hands, end effectors, and force-aware manipulation modules.
Product features and selection notes
Search-intent fit
ZHR-MEC-DE-TB-10-030-14 is a 12 V RS485 micro servo actuator for dexterous robotic thumb mechanisms. It provides 10mm stroke, 30N rated force, 40N maximum force, and +/-0.05mm repeatability for compact robotic hands, end effectors, and force-aware manipulation modules.
Compact precision actuation
Integrated motor, screw transmission, guided output, communication, and short-stroke control help reduce external transmission parts in compact machines.
High-force small-format output
30N rated force and 40N maximum force support direct comparison for coating adjustment, push-pull tooling, or robotic hand force sizing.
Integration checkpoints
Use these four values as the first reference for controller, wiring, body envelope, and installation fit.
- 01Control
- RS485
- 02Wiring
- Model-specific lead
- 03Body / Envelope
- Thumb mechanism
- 04Installation Fit
- 10mm stroke / 30N rated force
Technical specifications
| Stroke | 10mm |
|---|---|
| Rated Voltage | 12V |
| Repeatability | +/-0.05mm |
| Operating Temperature | -10~60°C |
| Rated Force | 30N |
| Maximum Force | 40N |
| Rated Current | 200mA |
| Peak Current | 400mA |
| Communication | RS485 |
| Screw | Planetary roller screw |
| Gearbox | Planetary gearbox |
| Motor | Coreless brushless DC motor |
Use these values to compare stroke, force, repeatability, current draw, and integration fit.
Use this model when the fit is right
This guidance is written for engineering selection. Confirm duty cycle, mounting stiffness, thermal conditions, and controller integration before production use.
Use this model when
- Dexterous robotic finger or thumb modules need short-stroke electric actuation.
- The design needs RS485 communication and a compact 12 V actuator envelope.
- The mechanism benefits from repeatable force-controlled or position-controlled grasp motion.
Check alternatives when
- The hand architecture requires long tendon routing from a remote motor pack.
- The joint requires a longer stroke or higher continuous force than this model is rated for.
- The project needs certified medical, prosthetic, or outdoor protection ratings without further qualification.
Questions about ZHR-MEC-DE-TB-10-030-14
Use these answers for model-level selection, integration review, and comparison with other compact linear actuators.
What is ZHR-MEC-DE-TB-10-030-14 best used for?
ZHR-MEC-DE-TB-10-030-14 is a 12 V RS485 micro servo actuator for dexterous robotic thumb mechanisms. It provides 10mm stroke, 30N rated force, 40N maximum force, and +/-0.05mm repeatability for compact robotic hands, end effectors, and force-aware manipulation modules.
What are the key specifications of ZHR-MEC-DE-TB-10-030-14?
Key specifications include 10mm stroke, 30N rated force, 40N maximum force, +/-0.05mm repeatability, 12V rated voltage, and RS485 communication.
When should I avoid selecting ZHR-MEC-DE-TB-10-030-14?
Avoid this model when the mechanism requires a longer stroke, outdoor environmental sealing, a higher continuous load than the rated force, or a speed and duty-cycle profile that has not been checked against the machine requirement.
Why use a compact actuator in a robotic hand?
Dexterous hands are constrained by finger space, wiring, heat, and moving mass. A compact electric actuator helps place controlled motion close to the finger or thumb while preserving space for sensors, structure, and cable routing.
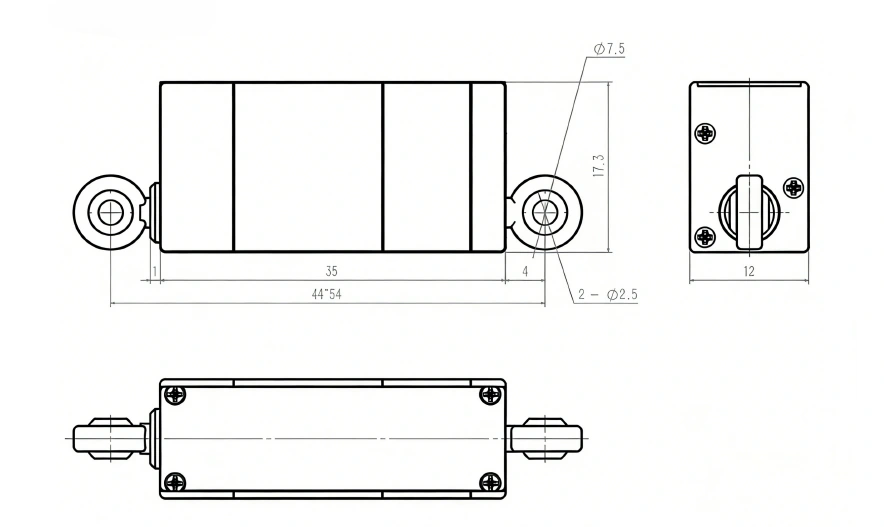
Dimension drawing
Evaluate ZHR-MEC-DE-TB-10-030-14 for your mechanism
Share stroke, force, duty cycle, installation space, and quantity requirements for model confirmation.