Short answer: a proprioceptive actuator is a robot joint module designed so the controller can infer and regulate joint state from internal feedback - motor current, position sensing, output encoder data, drive state and motion response. For humanoid legs, the most useful architecture is usually a QDD-style joint with low reflected inertia, high torque density, impact tolerance and high-rate communication.
Why This Topic Matters Now
ZHR Motor's latest GA4 data shows the strongest non-homepage engagement around torque density, humanoid actuator selection, harmonic-vs-planetary comparisons, EtherCAT/CANopen control and the ZHR-P product page. That traffic pattern points to one practical content gap: engineers are not only asking "which actuator has enough torque?" They are asking how the actuator behaves when a leg hits the ground, receives an impulse, or needs to close a torque loop.
The same question appears in research language as proprioceptive actuation. A humanoid can carry cameras and force sensors, but balance recovery still depends heavily on fast internal joint feedback and a drivetrain that does not hide contact forces behind friction, backlash or excessive reflected inertia.
1. What "Proprioceptive" Means in a Robot Joint
In robotics, proprioception means sensing the robot's own body state. At the joint level, a proprioceptive actuator helps the controller understand position, velocity, current, torque demand and load interaction through the actuator itself.
Signals engineers care about
- Motor-side and output-side position feedback
- Current or torque command tracking
- Backdriven motion after contact or impact
- Thermal and drive status during repeated gait cycles
Mechanical traits that help
- Low reduction ratio and low reflected inertia
- High overload margin for foot strike and recovery
- Efficient transmission with predictable friction
- Output sensing to compensate gearbox effects
Academic work on humanoid dynamic balancing with proprioceptive actuation emphasizes the same point: torque-controlled whole-body behavior depends on real-time computation, communication and careful handling of reducer friction. For legged locomotion, MIT Mini Cheetah research also highlights low-inertia, high-torque modular actuators for fast force changes during short ground-contact windows.
2. Why QDD Is a Natural Fit for Proprioceptive Legs
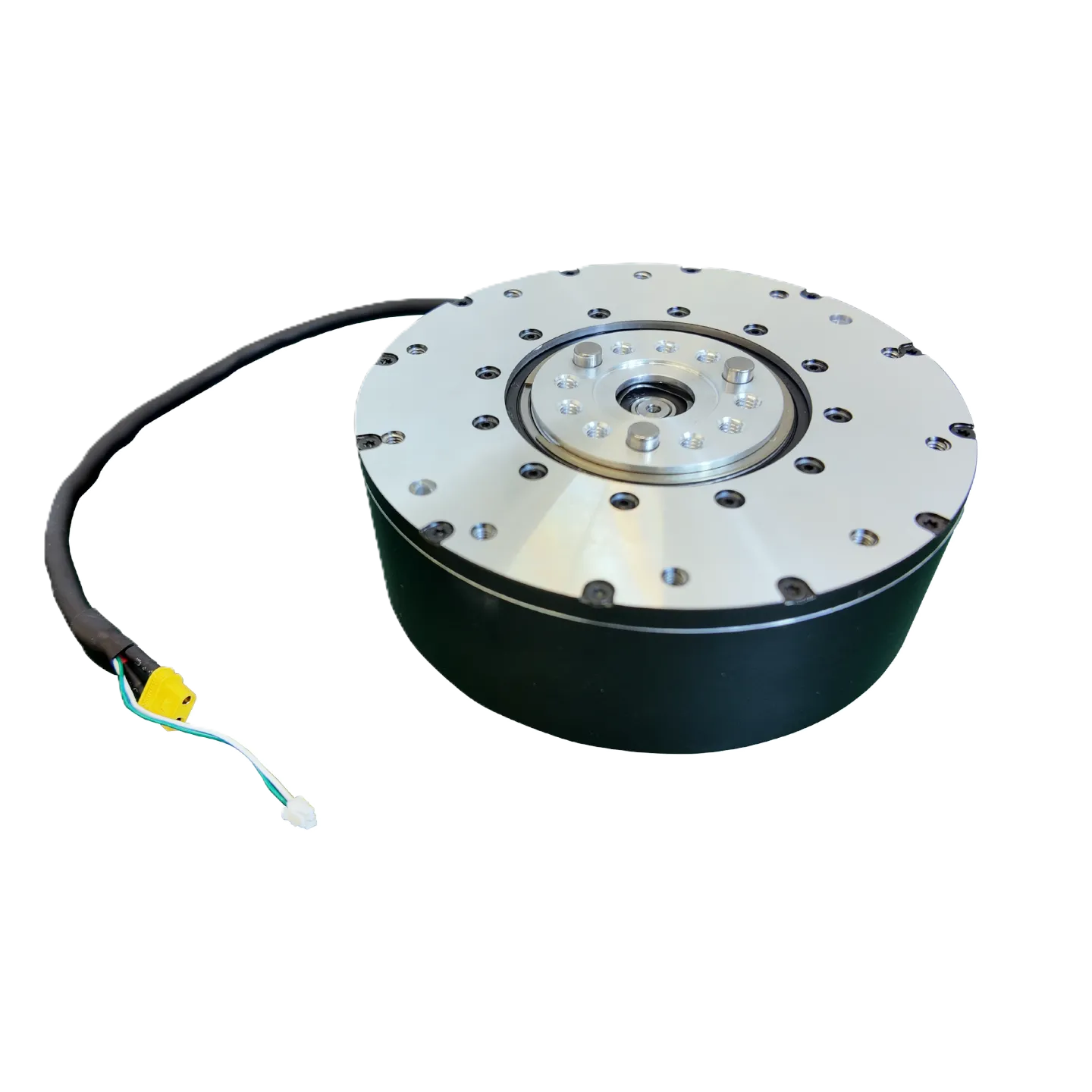
QDD, or quasi-direct drive, combines a high-torque motor with a low-ratio gearbox. The design keeps torque density practical while avoiding the very high reflected inertia of large-ratio reducers.
Reflected inertia check
Jreflected = Jmotor x N2
A 50:1 reducer reflects 25x more motor inertia than a 10:1 reducer, assuming the same motor inertia. That difference is exactly why low-ratio joints are attractive for ankles, knees and exoskeleton joints that must feel contact quickly.
For a pure positioning axis, a high-ratio precision reducer can be the right answer. For humanoid leg joints, the controller often needs impedance behavior, contact awareness and fast torque reversal. That is where QDD actuators for humanoid robots and backdrivable actuator design become important.
3. Joint Selection Matrix: ZHR-P vs ZHR-H
| Robot joint | Primary need | First ZHR family to evaluate |
|---|---|---|
| Hip | High continuous torque, balance recovery, shock load | ZHR-P60 / ZHR-P120 |
| Knee | Repeated flexion load, impact absorption, torque reversal | ZHR-P60 / ZHR-P120 |
| Ankle | Ground contact, backdrivability, compact torque density | ZHR-P36 / ZHR-P60 |
| Shoulder / elbow / wrist | Low backlash, compact precision, repeatable positioning | ZHR-H Series |
ZHR-P planetary/QDD-style modules cover 1.6-120 Nm rated torque with dual encoder feedback and EtherCAT/CANopen/CAN FD options. The series is the stronger match when impact tolerance, mechanical transparency and dynamic motion matter more than the absolute lowest mechanical backlash. ZHR-H harmonic modules remain the better starting point for compact precision axes and zero-backlash positioning.
4. Control Stack Checklist
A proprioceptive actuator is not only a gearbox choice. For humanoid and quadruped projects, confirm the full control stack before ordering samples.
- Feedback: use motor-side and output-side sensing when gearbox compensation or torque transparency matters.
- Communication: select EtherCAT for tightly synchronized multi-axis control, or CANopen/CAN FD when the system architecture favors simpler distributed bus wiring. Compare the trade-offs in the EtherCAT vs CANopen robot joint guide.
- Torque margin: size by continuous gait load, peak recovery load and thermal duty cycle, not only stall torque.
- Mechanical interaction: evaluate backdrivability, reducer friction, backlash compensation and shock path before finalizing the joint.
- Evidence: benchmark against humanoid actuator torque density and the broader robot actuator torque density comparison.
5. FAQ for Engineers
Is a proprioceptive actuator the same as a torque sensor?
No. A torque sensor directly measures load in a specific location. A proprioceptive actuator uses internal actuator feedback and models to estimate and control joint state. Some robots combine both approaches.
Does QDD always beat harmonic drive for humanoids?
No. QDD is usually stronger for dynamic lower-body joints. Harmonic reduction can still be better for compact precision joints where low backlash matters more than impact transparency.
Which ZHR-P models should be evaluated first?
Start with ZHR-P36 or ZHR-P60 for medium humanoid and quadruped joints, then move to ZHR-P120 for high-load hips, knees or wheel-drive axes. Use ZHR-P05/P14/P17 for smaller limbs, compact arms or mobile robot joints.
Need a proprioceptive QDD-style joint for a humanoid leg?
Compare ZHR-P models by torque, diameter, reduction ratio, protocol and overload margin before freezing the mechanical package.
Research References
- Dynamic Balancing of Humanoid Robot Walker3 with Proprioceptive Actuation
- Highly Dynamic Quadruped Locomotion via Whole-Body Impulse Control and Model Predictive Control
- MIT Mini Cheetah actuator and dynamic locomotion overview